
智能系统研究所成立于2019年,在原自动化研究所(2017年成立)的基础上,重新整合研究方向和学术资源组建而成。旨在抢抓人工智能发展的重大战略机遇,推进自动化和人工智能研究的紧密结合与快速发展。充分结合我校地学特色,通过多学科交叉创新,以智能自动化方法、技术与装备研究为核心,重点开展智能地质装备技术、情感计算、群体集群智能、计算机视觉、智能安全监控、智能制造、智能机器人、工业大数据及智能决策等研究。建设具有行业特色,集学术前沿探索与工程创新相结合的自动化与人工智能研究平台,培养适应于智能制造发展,兼具自动化和人工智能知识的复合型人才。
研究所依托“控制科学与工程”一级博士学位授权点,拥有一支高水平的学科队伍。共有教授14人、副教授4人。研究所成员均具有博士学位和海外留学经历。其中博导9人、省部级人才6人,教育部全国万名优秀创新创业导师人才库首批入库导师1人。学术梯队基础厚实、结构合理,团队科研凝聚力强。
依托学科建设特色和高水平学术梯队,研究所拥有坚实的科研积累和良好的发展前景。持续承担国家重点研发计划课题,国家自然科学基金重点项目、重点国际(地区)合作研究项目等国家级重点项目,以及国家自科基金面上项目及青年项目,科技部攻关项目,省基金及企业联合攻关项目等。团队成员获国家级、省部级科技奖励10余项,入选汤森路透公布的全球高被引科学家名单1人。
研究所主要研究方向包括:
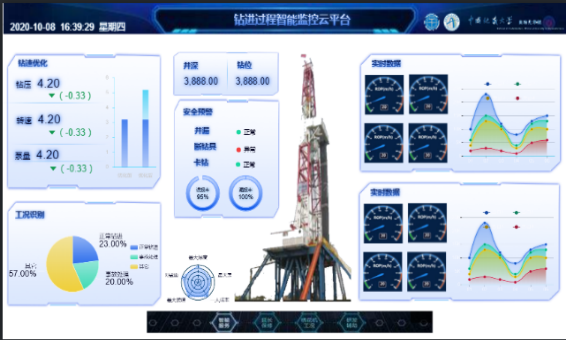
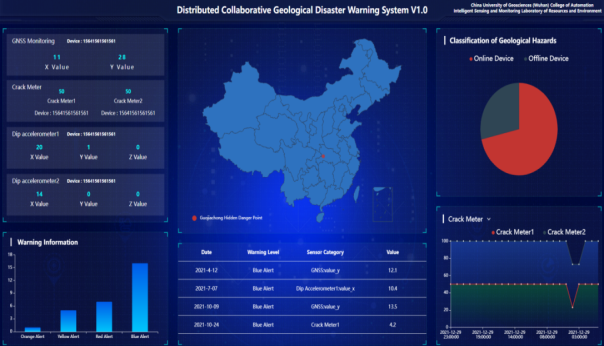
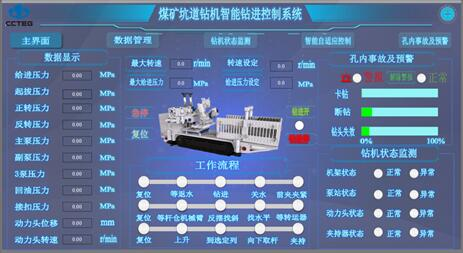
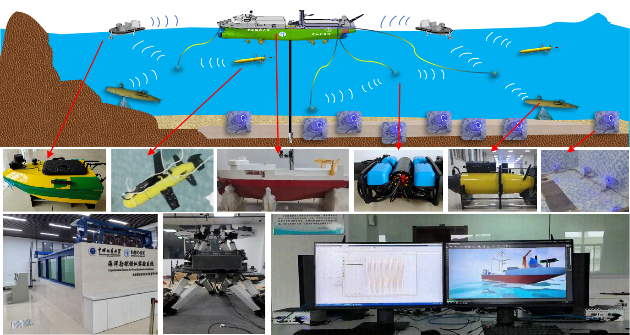
智能地质装备技术:面向国家发展目标和重大需求,围绕资源能源勘探与开发、科学钻探、遥感检测、自然灾害防范以及重大工程活动等领域人工智能技术的基础理论与方法、智能地球物理与遥感探测技术、钻探过程智能优化控制技术开展研究,建立成套地质装备智能控制系统,开发安全高效的地质装备工程应用技术,生产高性能成套智能地质装备,为国家资源能源勘探开发提供有力支撑。
|
|
复杂地质钻进过程智能控制系统 |
地质灾害智能监测物联网与预警平台 |
|
|
煤矿坑道钻机智能钻进控制系统 |
深海资源勘探环境感知与协同控制实验系统 |
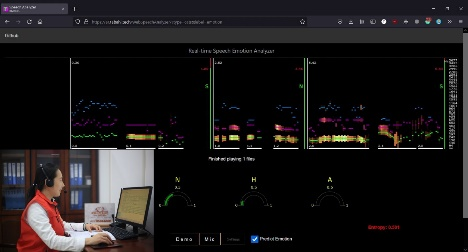
情感计算与情感机器人技术:面向机器人发展进入“互联网+人工智能+情感”的时代,考虑人机交互过程中的面部表情、语音、身体姿势、生理信号、个性化需求等情感相关信息,开展情感计算与情感机器人技术研究,基于跨媒体感知情感计算、情感计算模型的可解释性分析类脑和生物智能情感计算、高级机器学习情绪分析与心理评估等情感计算基础理论研究,开展面向不同场景的情感机器人系统研究,实现对人类情感理解与情感机器人自然交互,提高机器人的智能化水平。推动情感机器人在教育教学、心理健康评估、服务机器人等重点领域的应用。
|
|
教育教学情感机器人 |
心理危机干预热线语音心理评估系统 |
|
|
智能导览机器人 |
多模态情感交互系统 |



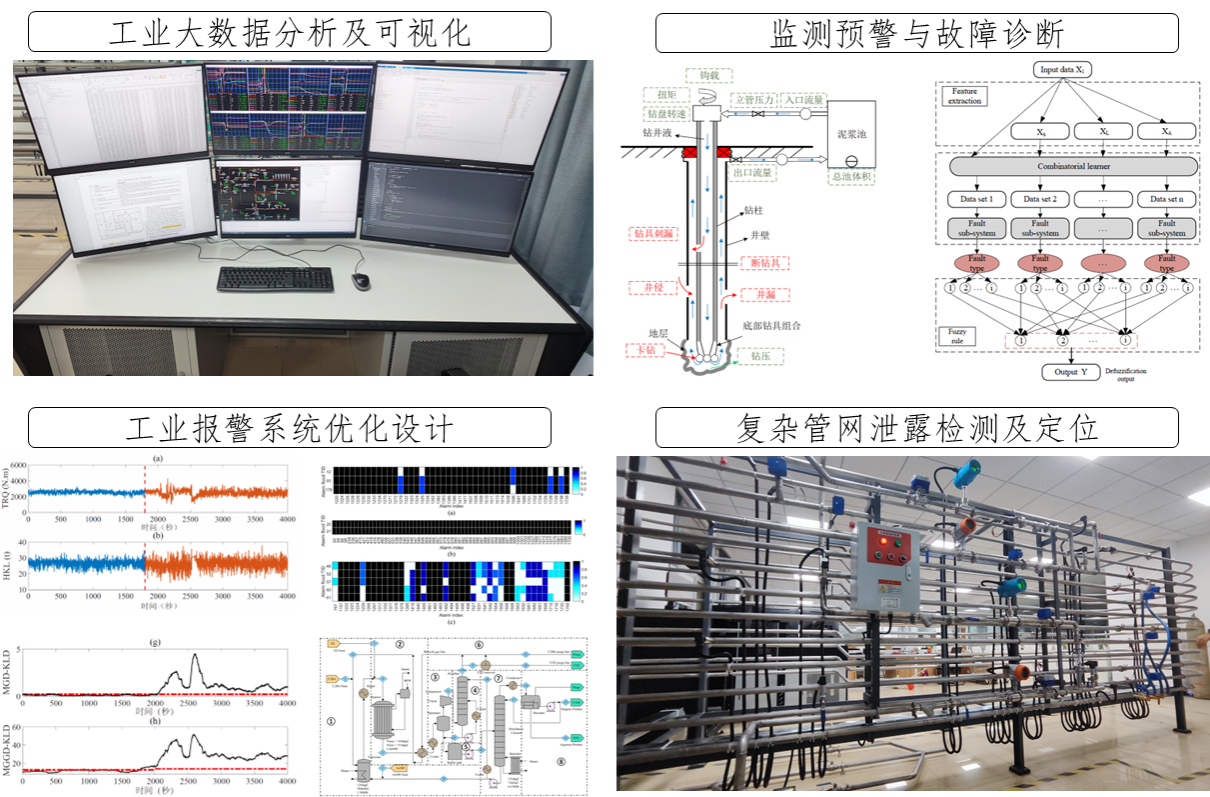
工业数据挖掘与智能监控:面向工业4.0和中国制造2025计划的重大机遇,针对智能制造中的建模、控制与诊断等问题,开展工业数据挖掘与智能监控技术研究,利用数据挖掘、智能优化、因果推理、深度学习等理论方法,解决复杂工业系统数据分析中的共性问题,为软测量建模、安全监控、报警管理、故障诊断及优化决策等实际工业问题的解决提供基础理论和工具,保障生产过程安全高效运行。
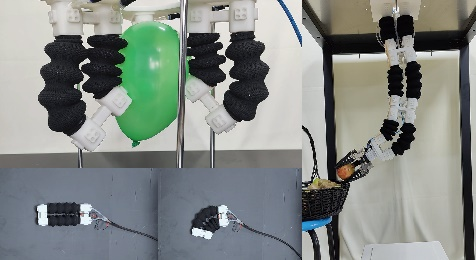
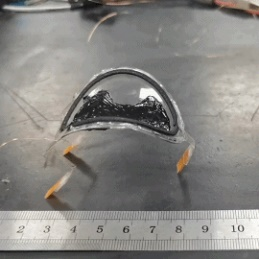
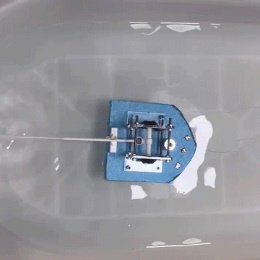
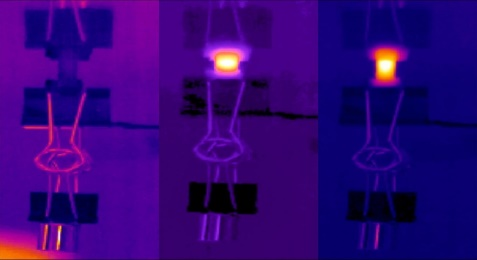
智能机器人建模及控制:为适应国家在智能机器人领域的重大战略需求,开展基于智能材料的软体机器人研究,分析智能材料的非线性特性,建立有利于实际控制系统设计的软体机器人半物理半唯象动力学模型,基于滑模控制、自适应控制、鲁棒控制、智能控制和强化学习控制等控制方法提出有效的软体机器人运动控制策略,推动软体机器人在易碎及不规则物体抓取、医疗康复、复杂狭窄地形勘探等特殊领域的应用;开展机电系统伺服控制的研究,提出具有鲁棒性、耐久性、重复性和抗扰性的控制策略,保证伺服系统控制的高精度和高性能,形成一套高精度、强鲁棒的智能机器人运动控制设计方案。
|
|
气动软体机器人 |
介电弹性体软体机器人 |
|
|
液晶弹性体软体机器人 |
磁控软体机器人 |


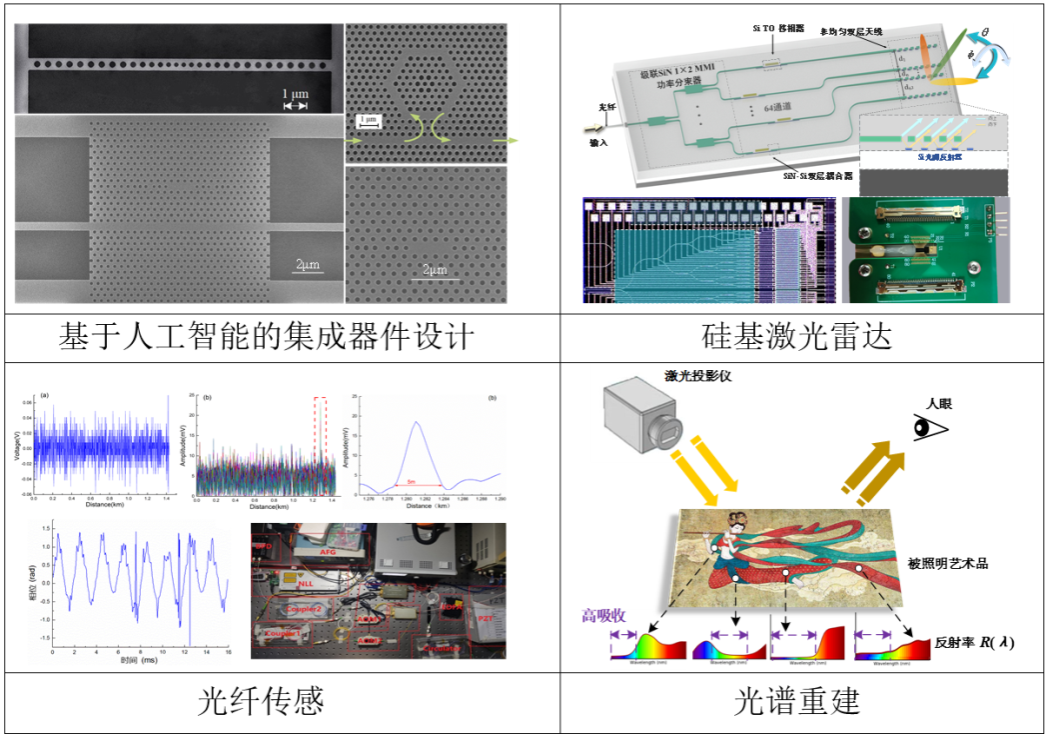
人工智能芯片: 以人工智能产业的实际需求为出发点, 利用硅基集成技术,攻克人工智能芯片与智能传感器的设计、制造和封装等技术,大幅度提升芯片的运算速度和降低集成系统的功耗,同时突破芯片架构创新,大力推动人工智能加速芯片向具备更高灵活性、适应性的通用智能芯片发展。打造高性能“中国芯”,即实现可编程性、高效的自学习能力、高效率、低成本和低功耗的人工智能芯片,进而推动人工智能芯片在交通、医疗和家居等领域的应用。
智能康复护理:针对传统康复护理手段已难以满足日益增长的老龄康复护理需求的问题,开展智能老龄康复护理机器人方向研究,采用多视角几何、深度学习、强化学习、视觉识别定位、人体姿态估计、全息图像可视化、李群流形分析等理论与方法,探索先进的智能康复护理方案,实现机器人自适应自学习能力与自然的人机交互能力,提高护理流程的安全性与效率,降低成本,为缓解人口老龄化问题提供有效的技术手段。
 |
|
下肢康复机器人 |
结构和负载可调的下肢康复机器人 |
|
|
左右独立的坐卧式下肢康复机器人 |
并联六自由度踝关节康复机器人 |



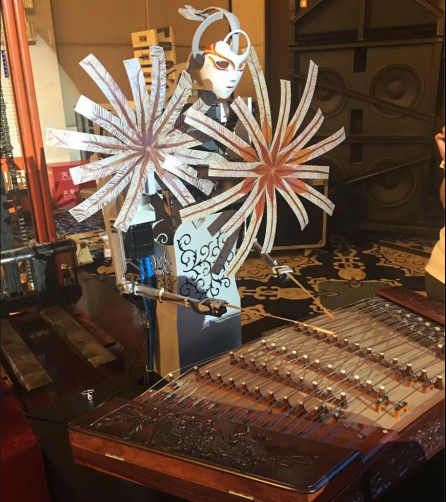
多机器人与人机协同技术:针对传统建模—优化—控制单向逻辑无法用于大规模、复杂环境、柔性任务的智能系统设计问题,研究适用于智能制造或智能地质装备的智能决策控制新机制和新系统。开展智能机器人学习控制理论与技术研究,为高端工业机器人,或空间、海洋机械装备的运动控制提供先进控制理论和方法。开发设计具有高精度视觉系统并能执行多任务的通用性配电带电作业检修机器人;结合先进的人工智能与大数据等技术等构建新型配电系统智能运维设备与配网调度的数字孪生体,促进配电系统的数字化转型。利用虚拟电厂技术研究新型配电系统调度和市场交易模型,保证配电系统的安全经济可靠运行以及对可再生能源的消纳能力。
|
|
第一代音乐机器人 |
第二代音乐机器人 |
|
|
110kV变电站带电作业机器人 |
10kV配网带电作业机器人 |



历任负责人
日 期 |
三级单位名称 |
所长 |
副所长 |
2022年1月 |
智能系统研究所 |
刘振焘 |
刘力、胡文凯 |
2019年4月 |
智能系统研究所 |
陈略峰 |
刘力、胡文凯 |
2017年7月 |
自动化研究所 |
陈鑫(兼) |
李长河 |

